




අඩු බල සම්ප්රේෂණයේදී ඉන්වොල්යුට් වර්ම් සහ ඉන්වොල්යුට් හෙලික්සීය ගියර් වල දැල් යුගලය බහුලව භාවිතා වී ඇත. මෙම ආකාරයේ දැල් යුගලය සැලසුම් කිරීම සහ නිෂ්පාදනය කිරීම සාපේක්ෂව පහසුය. නිෂ්පාදනයේදී, කොටස්වල නිරවද්යතාවය තරමක් දුර්වල නම් හෝ සම්ප්රේෂණ අනුපාතය සඳහා අවශ්යතා ඉතා දැඩි නොවේ නම්, එය හොඳ තේරීම් ක්රමයක් ද වේ.
වර්තමානයේ, මෙම ආකාරයේ සම්ප්රේෂණ යුගලයක් සාමාන්ය සැලසුම් දත්තවලට ඇතුළත් කර නොමැත, මන්ද එහි න්යාය තවමත් සම්පූර්ණයෙන්ම පරිණත වී නොමැති බැවිනි.
මෙම ආකාරයේ දැල් යුගලය සාමාන්ය ලක්ෂ්ය සම්බන්ධතා සම්ප්රේෂණ යුගලයකි. අන්වීක්ෂීය දෘෂ්ටි කෝණයෙන්, දේශීය ආතතිය විශාල වන අතර කාර්යක්ෂමතාව අඩුය. වාසනාවකට මෙන්, සම්ප්රේෂණ ව්යවර්ථය කුඩා වන අතර කාර්යක්ෂමතාව සඳහා අවශ්යතා අඩුය. එබැවින්, එය තරමක් අලෙවි කළ හැකිය. එවැනි සැලසුමක් පණු ගියර් නිෂ්පාදනය සහ එකලස් කිරීමේදී පවතින විවිධ ගැටළු මඟහරවා ගනී.
මෙම පත්රිකාව ප්රධාන වශයෙන් සාකච්ඡා කරන්නේ ස්පර්ශක ලක්ෂ්යයේ චලනය වන දිශාවට සජීවිකරණයක් භාවිතා කරමින් ඉතා කුඩා පරාසයක සාමාන්ය දිශාවට චලනය වන මෙවැනි ස්පර්ශක යුගලයක නිරූපණයයි.
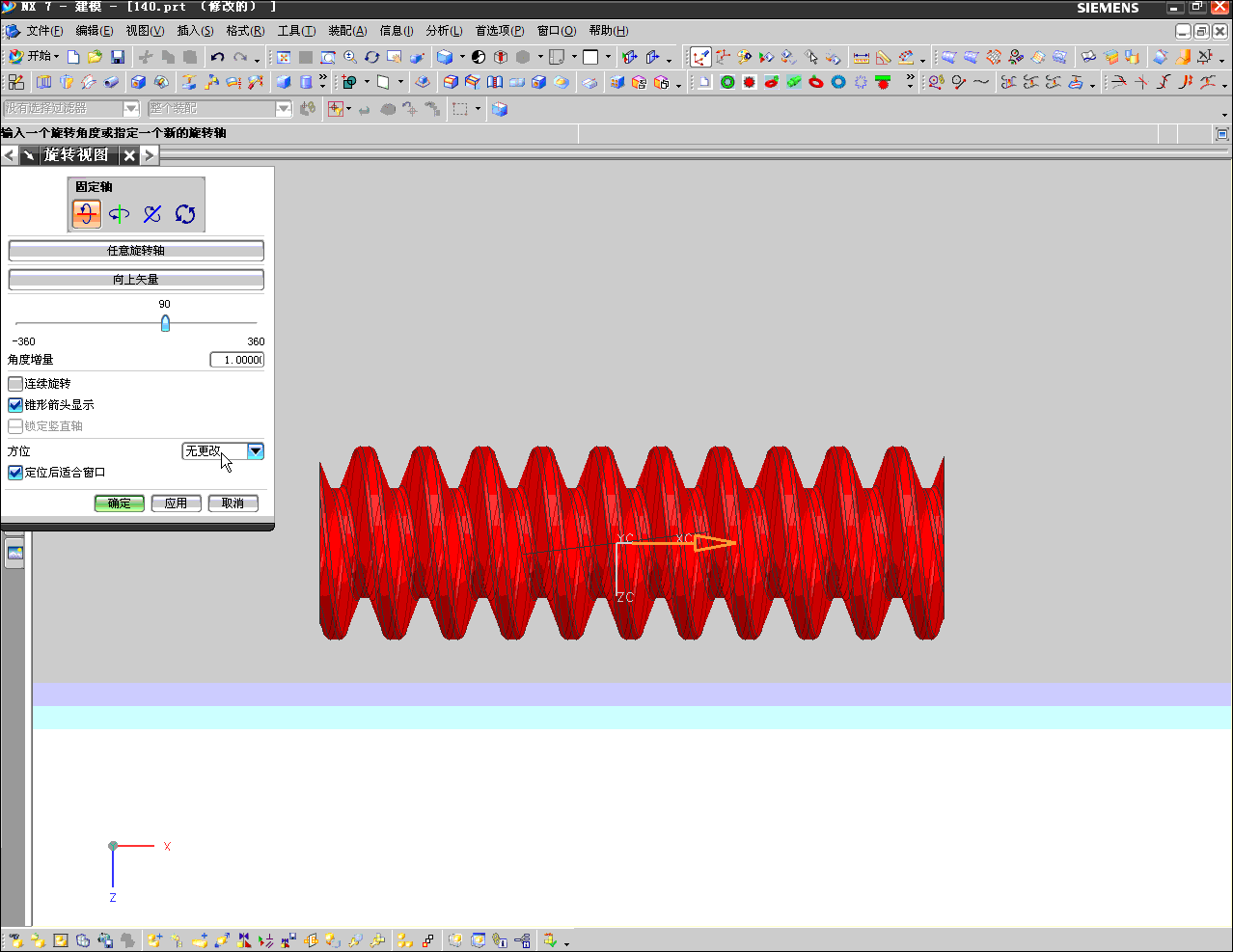
චිත්රයේ ඇති දැල් යුගලයේ මැද කොටසේ තලයක් සාදා, එය චිත්රයේ ඇති පාරභාසක සහ ප්රතිවිරුද්ධ වර්ණයට සකසන්න, ඉන්පසු පහත රූපයේ දැක්වෙන පරිදි, ගියර් මධ්යයේ සිට සාමාන්ය තලයේ ස්ථානයේ පිහිටා ඇති පණුවා දක්වා සිරස් රේඛාව වටා පණුවා නැගී එන කෝණයක් කරකැවීමට ඉඩ දෙන්න:
ප්රතිකාර කිරීමෙන් පසු, දැල් සලකුණු පරීක්ෂා කිරීමට අවශ්ය සම්ප්රේෂණ යුගලය ප්රතිවිරුද්ධ වර්ණයකට ගෙන, ඒවායින් එකක් පාරභාසක ලෙස ගන්න, එවිට ගතික සමාකරණයේ සම්පූර්ණ ක්රියාවලියේදී දැල් ස්ථානයේ චලනය පැහැදිලිව දැකගත හැකිය. පහත දැක්වෙන පරිදි:
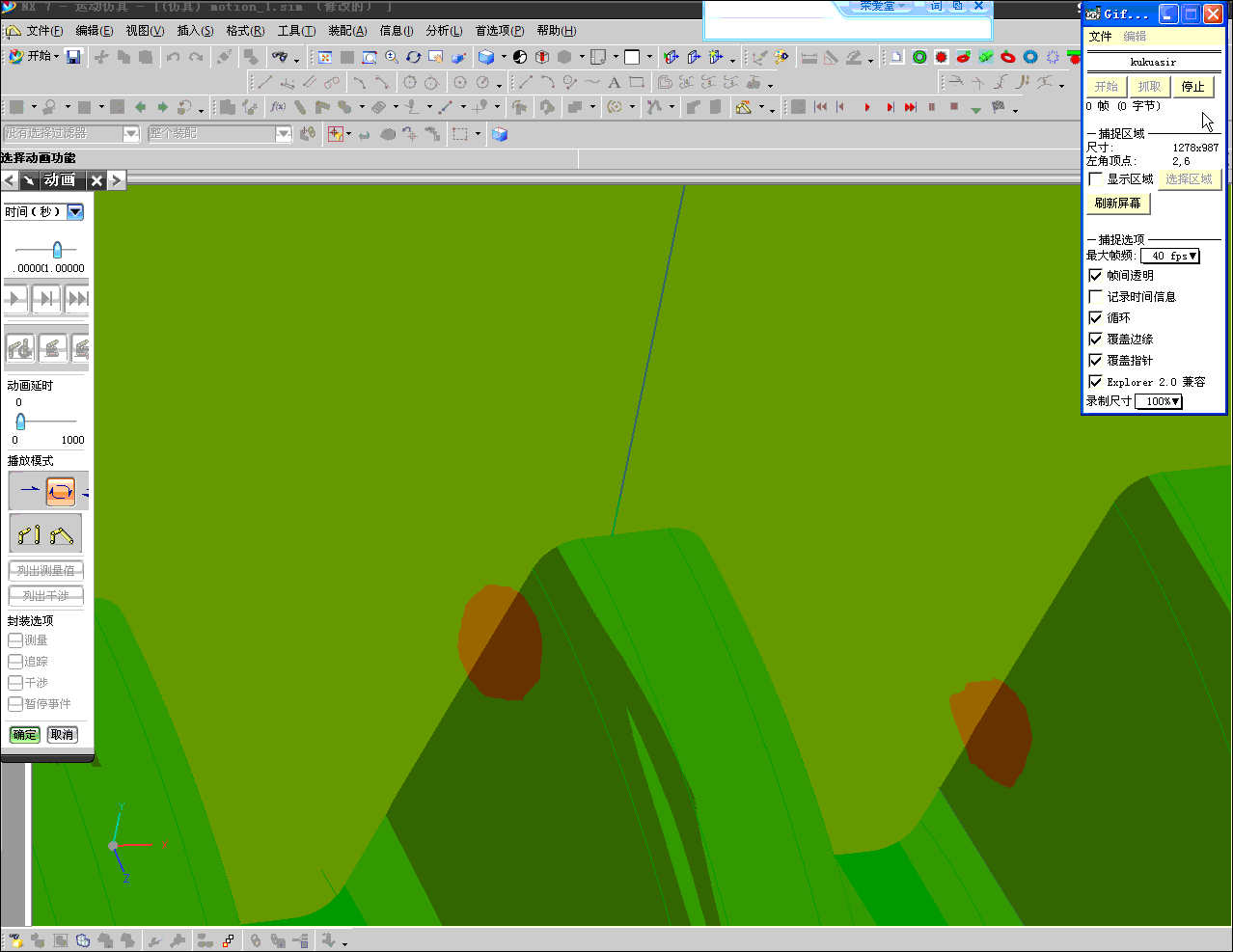
පැහැදිලි ප්රතිවිරුද්ධ වර්ණයක් සහිත දැල් ස්පර්ශක ලක්ෂ්යයේ චලනය අතරතුර, එය සාමාන්ය පත්රය හරහා ගමන් කරන බව දැකිය හැකිය.
ඉහත උදාහරණයේ ගණනය කරන ලද වාර්තා:
හෙලික්සීය ආම්පන්න සහිත පණුවාගේ මූලික ගණනය කිරීමේ වාර්තාව
ආදාන දත්ත
සාමාන්ය මාපාංකය: 6 පණු සුචිගත කිරීමේ කව විෂ්කම්භය: 5 පණු හිස අංකය: 1 හෙලික්සීය ගියර් දත් අංකය: 40
සාමාන්ය පීඩන කෝණය: 20 හෙලික්සීය ගියර් පූර්ව තේරීම හෙලික්සීය කෝණය: 6.89210257934639
ගණනය කිරීමේ දත්ත
සාමාන්ය මාපාංකය: හය
අක්ෂීය මාපාංකය: ට්රිලියන හයසිය හතරයි තුන්සිය හැට හතයි බිලියන දෙසිය විසිතුන මිලියන දහනව දහස් තිස් පහයි
නූල් නැගීමේ කෝණය: 6.89210257934639
සර්පිලාකාර දිශාව: පණුවා සහ හෙලික්සීය ගියරය එකම දිශාවකට පිහිටා ඇත.
ශුන්ය විස්ථාපනයේ මධ්ය දුර: 14.5873444603807
ආදාන සම්ප්රේෂණ යුගලයේ මධ්ය දුර: 14.75
ඉස්කුරුප්පු දත්වල සමාන සංඛ්යාව: 8.27311576399391
පණුවාගේ අක්ෂීය පීඩන කෝණය: 20.1339195068419
හෙලික්සීය ගියර් වල රේඩියල් අපගමන සංගුණකය: දෙදහස් හත්සිය එකොළහ
පණුවාගේ හෙලික්ස් කෝණය: 83.1078974206537
පණුවාගේ මූලික පරාමිතීන් 83.10789742065361
පණු ප්රධාන විෂ්කම්භය: 6.2 පණු සුළු විෂ්කම්භය: 3.5 පණු දත් අංකය: 1
පණුවාගේ සාමාන්ය මාපාංකය: 6 පණුවාගේ සාමාන්ය පීඩන කෝණය: 20 පණුවාගේ සුචිගත කිරීමේ කවයේ විෂ්කම්භය: 5
පණුවාගේ රේඩියල් විස්ථාපන සංගුණකය: 0 පණුවා පාදක කවයේ විෂ්කම්භය: 1.56559093858108
වර්ම් අන්ත මොඩියුලය: 5 වර්ම් අක්ෂීය මොඩියුලය: ට්රිලියන හයසිය හතරයි තුන්සිය හැට හතයි බිලියන දෙසිය විසිතුන මිලියන දහනව දහස් තිස් පහයි
පණුවාගේ අක්ෂීය පීඩන කෝණය: 20.1339195068419 පණුවාගේ අන්ත මුහුණත පීඩන කෝණය: 71.752752179164
පණුවා සුචිගත කිරීමේ කවයේ සාමාන්ය දත් ඝණකම: 942477796076937 පණුවා සුචිගත කිරීමේ කවයේ දත් උස මැනීම: හය
පණුවා සුචිගත කිරීමේ කව නූල් නැගීමේ කෝණය: 6.89210257934639 පණුවා සුචිගත කිරීමේ කවය හෙලික්ස් කෝණය: 83.1078974206537
පණුවාගේ ඵලදායී දතෙහි දිග: 25
පණුවා (අක්ෂීය) ඊයම්: 1.89867562790706
හෙලිකල් ගියර් වල මූලික පරාමිතීන්
හෙලික්සීය ගියරයේ ප්රධාන විෂ්කම්භය: 25.7 හෙලික්සීය ගියරයේ සුළු විෂ්කම්භය: 23 හෙලික්සීය ගියරයේ දත් ගණන: 40
හෙලික්සීය ගියරයේ සාමාන්ය මාපාංකය: 6 හෙලික්සීය ගියර් සාමාන්ය පීඩන කෝණය: 20 හෙලික්සීය ගියර් වෙනස් කිරීමේ සංගුණකය: දෙදහස් හත්සිය එකොළහ
හෙලිකල් ගියර් සුචිගත කිරීමේ කවයේ විෂ්කම්භය: 24.1746889207614 හෙලිකල් ගියර් පාදක කවයේ විෂ්කම්භය: 22.69738911811
හෙලික්සීය ගියර් අන්ත මුහුණත මොඩියුලය: 604367223019035 හෙලික්සීය ගියර් අන්ත මුහුණත පීඩන කෝණය: 20.1339195068419
හෙලිකල් ගියර් සුචිගත කිරීමේ කවයේ හෙලිකල් කෝණය: 6.89210257934639 හෙලිකල් ගියර් පළල: 10
හෙලිකල් ගියර් (අක්ෂීය) ඊයම්: 628.318530717958
හෙලික්සීය ගියරයේ පොදු සාමාන්ය රේඛාව හරහා දත් ගණන: 5 හෙලික්සීය ගියරයේ පොදු සාමාන්ය රේඛාවේ නාමික අගය: 8.42519
හෙලික්සීය ගියරයේ පොදු සාමාන්ය රේඛාව හරහා දත් ගණන: 6 හෙලික්සීය ගියරයේ පොදු සාමාන්ය රේඛාවේ නාමික අගය: 10.19647
ආක්රමණශීලී පණුවා ආකෘතිකරණය සඳහා භාවිතා කරන අන්ත මුහුණත ආක්රමණශීලී රේඛා රූප සටහන:
පළ කිරීමේ කාලය: ජූනි-11-2022